|
|
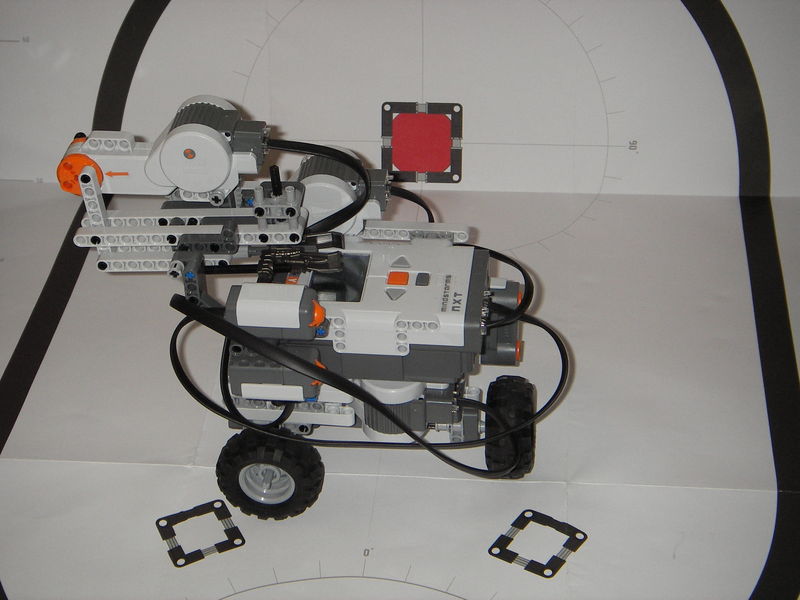
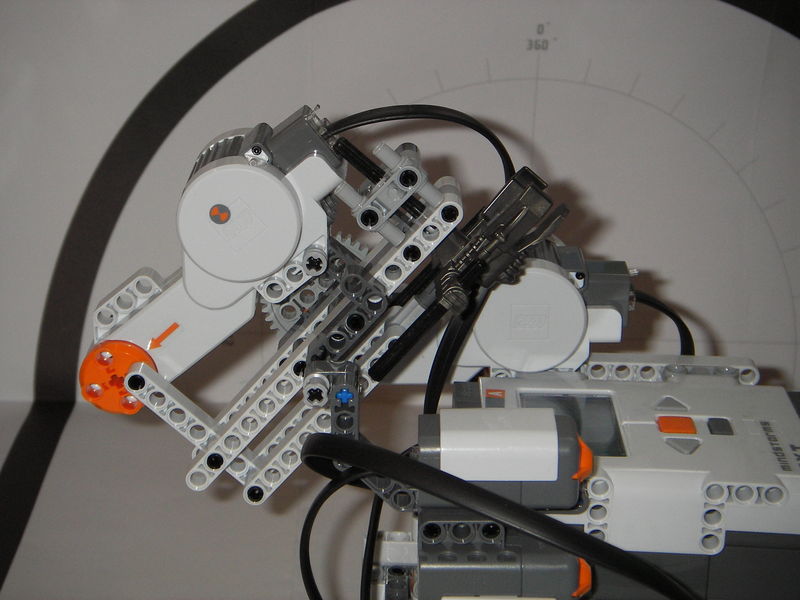
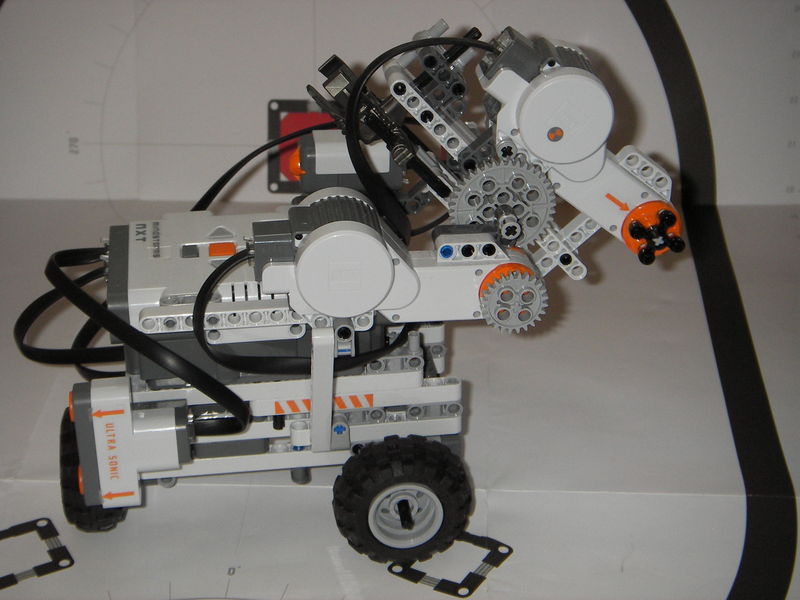
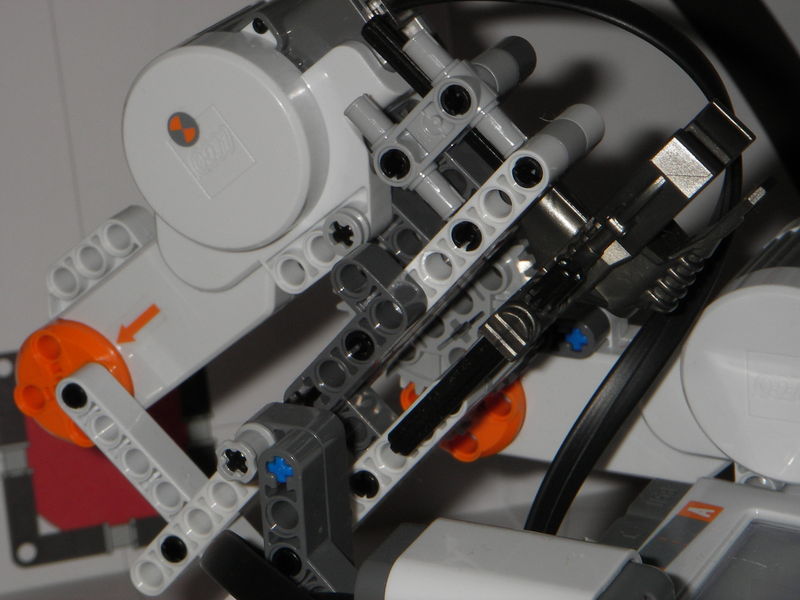
Ball Thrower |
|
This ball thrower throws "Zamor" balls. It uses the ultrasonic sensor to measure the distance to the target (a square bucket, 20x40x40 centimeters) and can rotate to find the object. The device that pushes the plastic ball is quite sturdy and ensures predictable trajectories. The whole throwing structure can be lifted to adjust the throwing distance. It can lift up to 90 degrees but as the ball leaves the holding at a slight angle, this results already in a distance of 60 centimeters. The maximum throwing distance is 210 centimeters. Without rotating the thrower, the shooting results were well reproducible. There is a push sensor, to throw a ball. When used with rotation to find the target, the maximum distance to detect the box was down to about 1 meter, beyond this, the box just was not found, perhaps because the sensor is a bit close to the ground. The rotation chassis did not work too well anyway. When there was just a little bit of counter pressure (e.g. thick carpet) the bevel gears where slipping. Maybe the construction could be improved but we are tired of getting the balls back from underneath the sofa, where the always seem to end up, so we are off to other non-throwing robots. 
|
|