|
|
Swinging Robot Experiments |
|
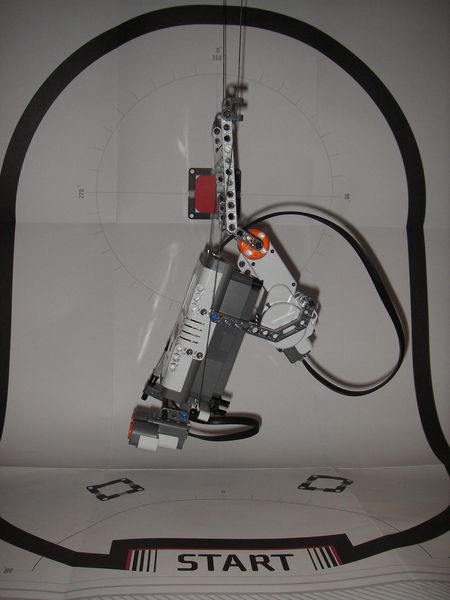
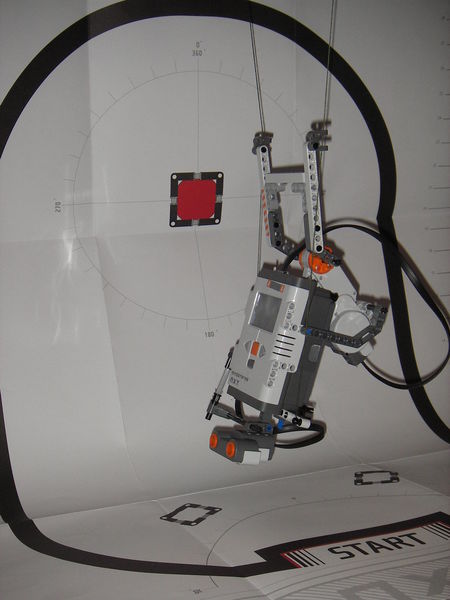
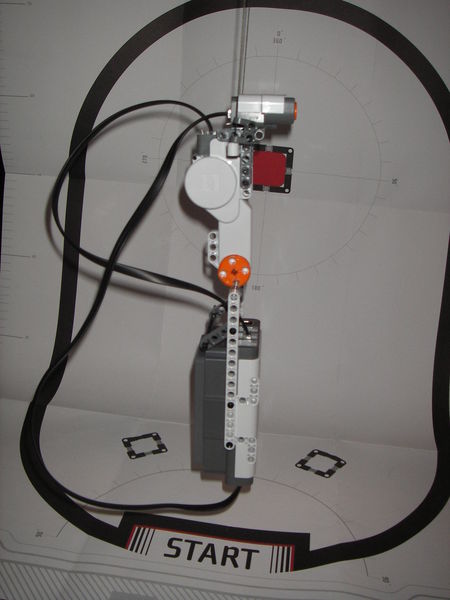
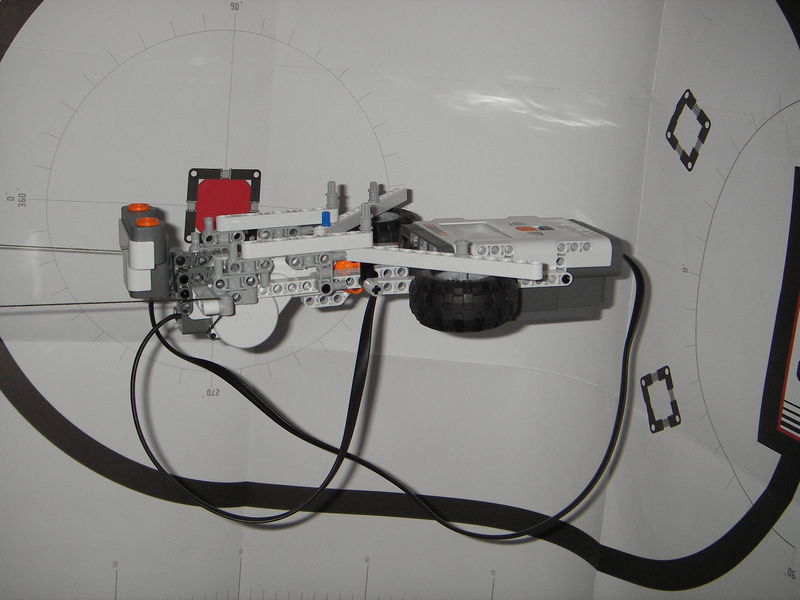
With this project we were trying to get the NXT to swing. We have tried several designs and succeeded at least to some extend. Funnily enough the design that worked best was the one that most closely resembles a child on a swing. Physics: A swing when only pushed stops after a while due to friction. To overcome the loss of friction and eventually gaining additional amplitude, the swinging object needs to add energy to the movement. The strongest effect is supposed to be the one where the center of weight of the swinging object moves radially in the right phase. The optimal movement is a shortening of the pendulum at the lowest point and an elongation at the peak points. Test stand: We used a household ladder to hang up the NXT. The swing had a length of approximately 1 meter. A meter is not long for a swing. The frequency of the movement is quite fast in relation to the speed of the NXT motors. Swinging Kid (main picture): The swinging kid robot looks slightly like a kid on a swing. The ultrasonic sensor was moving around a lot, so the distance reading sometimes failed. Otherwise this worked quite well and there was a notable increase of the swinging amplitude compared to the initial push we provided. Dangling Device (second picture): The dangling device pulls the NXT up by half a turn of the actuator. In the end the only thing that worked quite well to let the motor run continuously with a speed compatible to the swinging frequency. After some time the phase of the motion synchronized with the phase of the motor. Nervous Arm Raiser: The nervous arm raiser was supposed to raise his arms quickly when at the lowest point, letting them drop somewhere when swinging towards maximum. With a good program, this one wood perhaps work quite well but we did not really succeed in getting the actuator movement in line with the movement of the swing. Also, the heavy arms that are rapidly flipped upwards caused the robot to disintegrate after a number of experiments. Conclusion: The key is to get the synchronization of the swing movement with the actuator movement right. This is difficult for a fast going pendulum. In the (distant) future we want to revisit the problem with a bigger ladder, or with our swing in the garden in summer. This would give us a slower going pendulum. We are also thinking about using the light sensor to determine the lowest point of the movement with more accuracy. Finally it would be great to see other project on this topic as we think that swinging is an interesting and challenging robot activity. 
|
|