|
|
Linienfolger I |
|
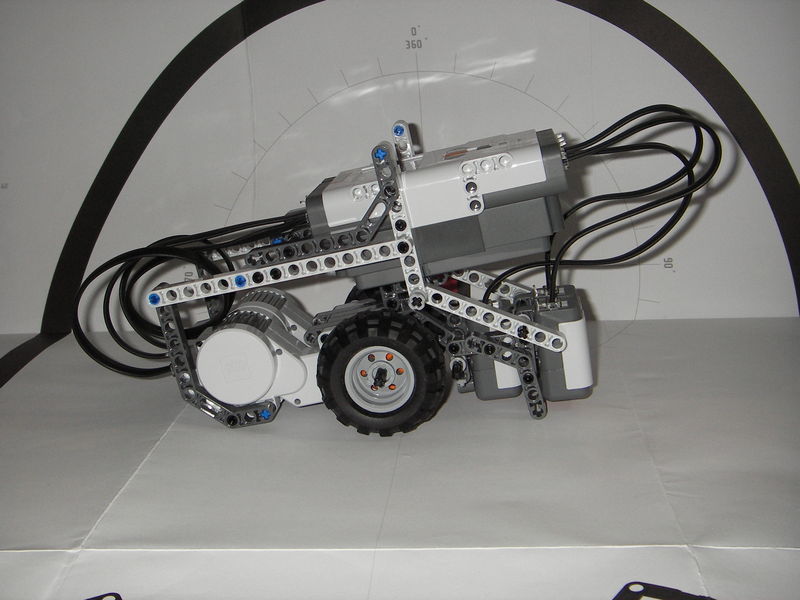
Dies ist eineLinienfolger mit 3 Lichtsensoren. Durch die 3 Sensoren kann er zügig in der Mitte einer Linie fahren und auch deren Ende erkennen. Der Steuerungsalgorithmus für diesen Linienfolger ist sehr einfach: Die Differenz der Lichtwerte der beiden Sensoren werden zur Leistungssteuerung der Motoren für den einen Motor von einem Mittelwert abgezogen und für den Anderen dazu gezählt. Wenn der mittlere Sensor die Linie nicht mehr sieht, werden die beide Motoren angehalten. Wird der Roboter wieder auf eine Linie gesetzt, fährt er los. Anstatt eines Hinterrades, ist der Roboter so getrimmt, dass er mit dem Hinterteil nur leicht über den Boden schleift. 
|
|