|
|
Sandplotter |
|
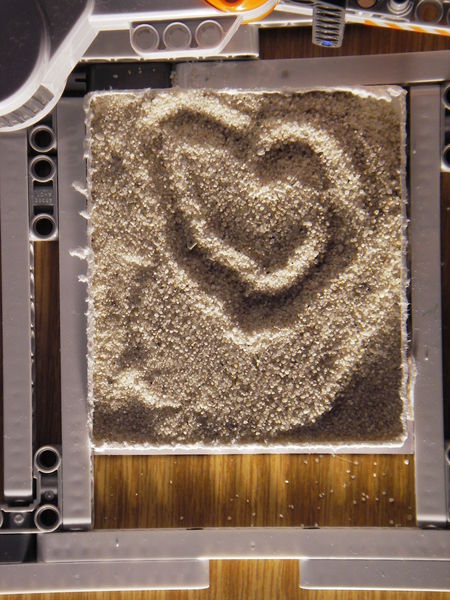
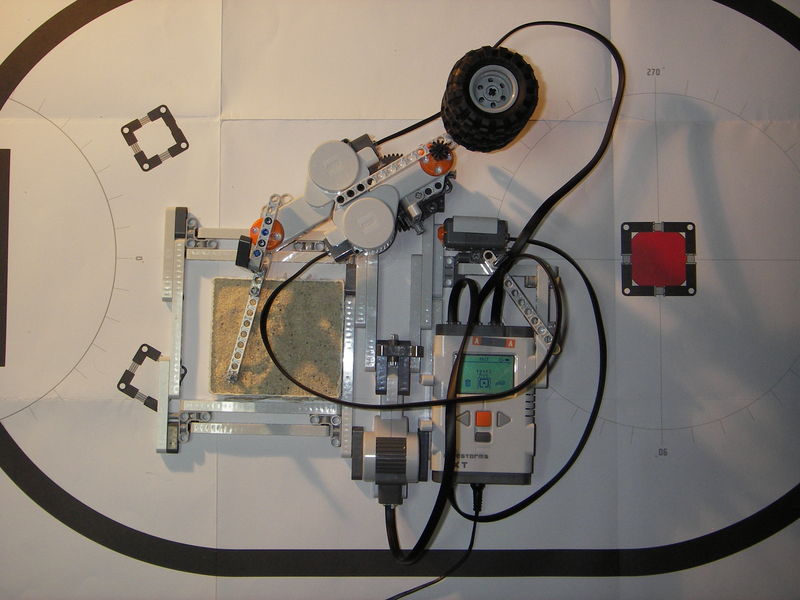
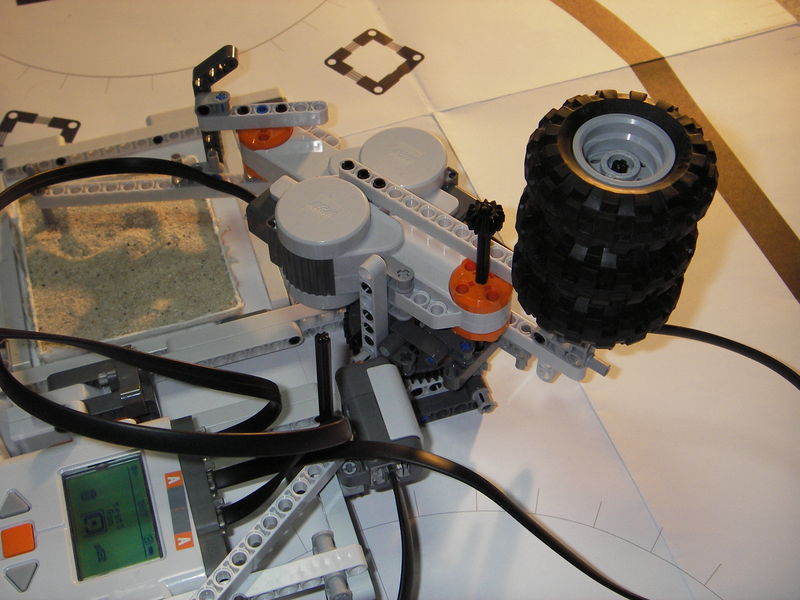
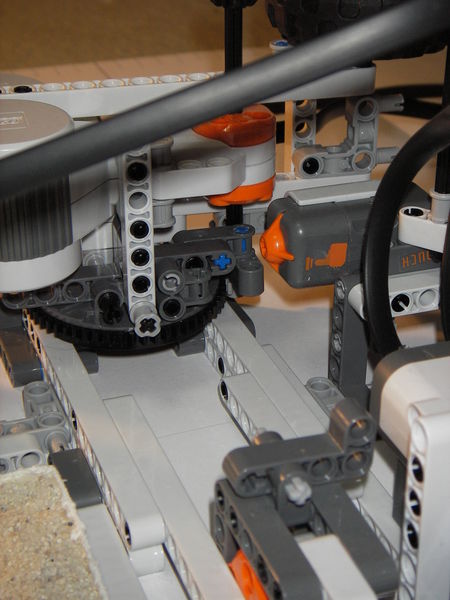
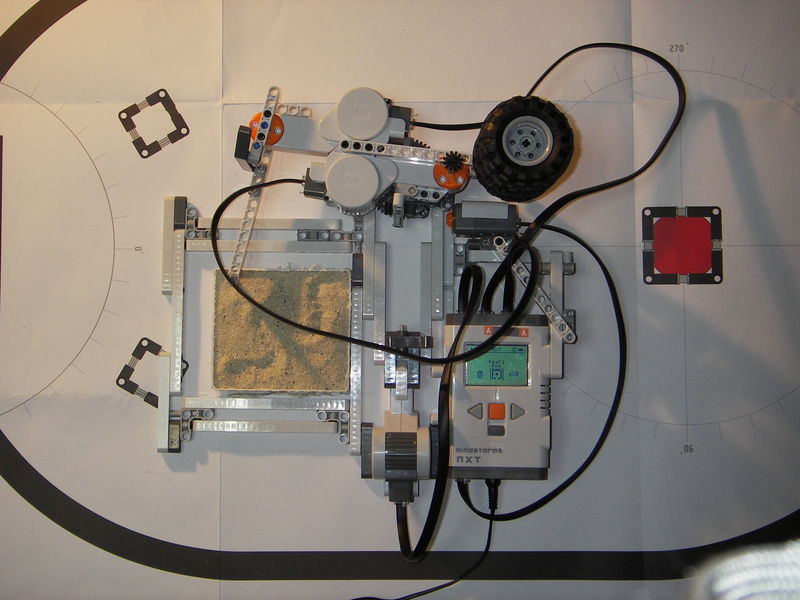
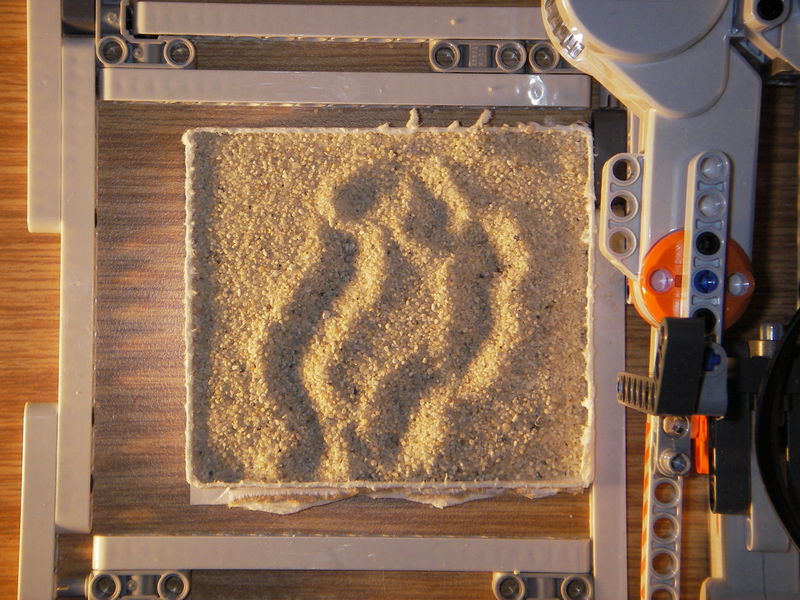
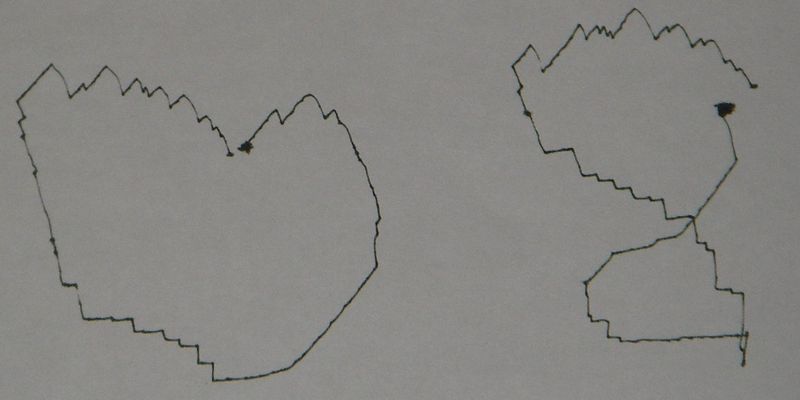
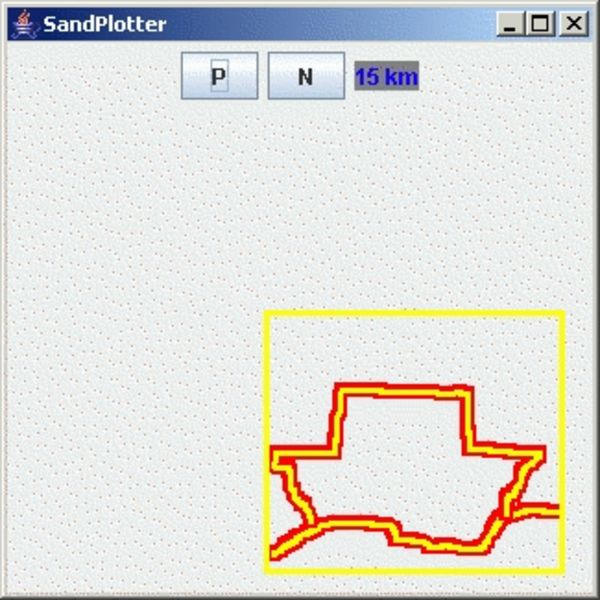
Der Sandplotter ðhnelt einem menschlichen Arm. Zeichnen geht, aber die Zeichnungen mit einem Stift sind recht krakelig, da das Programm schrittweise arbeitet. Die Stiftzeichnung (Kritzelbild rechts) soll ein Herz und eine 8 darstellen. In dem etwas poetischeren Medium Sand dagegen, sehen die Sachen ganz in Ordnung aus. Der Plotter hat einen zweigeteilten Arm. Die beweglichen Armteile sind etwa gleich lang, dadurch bleiben die Gleichungen zur Umrechnung von XY-Koordinate in die beiden Beugewinkel einfach. Der ganze Arm kann durch den 3ten Motor angehoben werden, f■r ein "GEHE ZU". Der "Stift" ist einfach eine kurze Legostange, die sich am Armende in den Sand bohrt. Das Programm auf dem NXT liest eine Datei mit Plotbefehlen. Jeder Befehl besteht aus 3 Teilen. Die erste Zahl gibt den Ziehmodus an (Stift hoch, Stift runter). Die beiden folgenden Zahlen beschreiben die relative Bewegung des Armes. Da wir nicht mit "Tasks" programmiert haben, muss die Bewegung in kleinen Schritten erfolgen. Da die Steuerdateien relative Bewegungen angeben, sind sie recht schwer von Hand zu berechnen. Wir haben uns daf■r ein kleines Java Programm geschrieben. Der Plotter kalibriert sich vor jeder Zeichnung. Dazu fðhrt er den Unterarm nach rechts, bewegt dann den Oberarm bis an den Ber■hrungssensor um dann den Unterarm wieder nach links zu fahren, bis er blockiert. Der Heber wird auch kalibriert, in dem er sich bis zum Anschlag dreht und danach 270¯ zur■ck in die "Arm unten" Position. Das kleine Java Programm zum Generieren der Steuerdateien besteht aus einem Zeichenfeld, in dem mit dem Mauszeiger gemalt werden kann. Die XY-Koordinaten des Mauszeigers werden dabei in Drehwinkel f■r die Motoren umgerechnet. F■r die entsprechend Interessierten sind hier die Formeln angegeben. Der Faktor 6.8 in der ersten Gleichung ergibt sich aus der Untersetzung im Oberarmgelenk: -(6.8 * (90.0 + 180.0 / Math.PI * Math.acos(0.5 * Math.sqrt(x * x + y * y)) - 180.0 / Math.PI * Math.atan(x / y))); F■r den Unterarm gilt: 2.0 * 180.0 / Math.PI * Math.acos(0.5 * Math.sqrt(x * x + y * y)) Da der Plotter relative Steuerbefehle erwartet, wird jeweils die Differenz zwischen zwei Punkten abgelegt. Das Programm ist recht schlicht und man muss hðufig klicken, damit die Linien nicht zu zackig werden. Das Beispielbild soll eine Schiff in Wellen darstellen. Das war wohl schon eine Éberforderung f■r den Zeichner und den Plotter. Immerhin reicht es f■r Herzen, Achten und Schlangen. Ein Beispiel f■r einen perfekten Plotter kann man im NXTLog auf www.mindstorms.com bewundern, wenn man nach "nilsvoelker" sucht. 
NXC Quelltext:
#define OBERARM OUT_C
#define UNTERARM OUT_B
#define HEBER OUT_A
#define OBERARM_POLLER_KANAL IN_1
#define OBERARM_POLLER SENSOR_1
#define HEBEWINKEL 150
#define GEHEZU_AKTION 1
#define LINIEZU_AKTION 2
sub playATone()
{
SoundPlayToneType sptArgs;
sptArgs.Frequency = 440;
sptArgs.Duration = 400; // 1
sptArgs.Loop = false;
sptArgs.SoundLevel = 3;
SysSoundPlayTone(sptArgs);
}
sub playErrorTone()
{
SoundPlayToneType sptArgs;
sptArgs.Frequency = 440;
sptArgs.Duration = 400; // 1
sptArgs.Loop = false;
sptArgs.SoundLevel = 3;
SysSoundPlayTone(sptArgs);
}
/*
Hebt den Stift
*/
inline void stiftHoch()
{
if (MotorRotationCount(HEBER) > -50)
{
RotateMotor (HEBER,-40,HEBEWINKEL);
}
}
/*
Senkt den Stift
*/
inline void stiftRunter()
{
if (MotorRotationCount(HEBER) < -50)
{
RotateMotor (HEBER,30,HEBEWINKEL);
}
}
inline void schreib(int A, int B)
{
RotateMotor (OBERRARM,30,A);
RotateMotor (UNTERARM,30,B);
}
task main ()
{
byte plotDatei;
int fSize;
/*
Kalibriere, Schreibarm an das Gehðuse.
Heber gegen den Poller und dann nach unten
*/
SetSensorTouch (OBERARM_POLLER_KANAL);
// Unterarm zur■ck
OnFwd (UNTERARM,-10);
Wait (2000);
Off(UNTERARM);
// Oberarm an Poller
OnFwd (OBERARM,30);
while (OBERARM_POLLER==0)
{
Wait(100);
}
Off(OBERARM);
// Unterarm anlegen
OnFwd (UNTERARM,10);
Wait (3000);
Off(UNTERARM);
// Heber zur■ck
OnFwd(HEBER,20);
Wait(4000);
Off(HEBER);
// Heber auf null
RotateMotor (HEBER,-30,270);
ResetRotationCount(OUT_ABC);
stiftHoch();
if (NO_ERR == OpenFileRead("plotdatei.txt",fSize,plotDatei))
{
int aktion;
// Unterarmwinkel
int A;
// Oberarmwinkel
int B;
bool eof=false;
while (true != eof)
{
string buf;
if(ReadLnString(plotDatei,buf) != NO_ERR)
{
eof = true;
break;
}
aktion=StrToNum(buf);
if(ReadLnString(plotDatei,buf) != NO_ERR)
{
eof = true;
break;
}
A=StrToNum(buf);
if(ReadLnString(plotDatei,buf) != NO_ERR)
{
eof = true;
break;
}
B=StrToNum(buf);
switch (aktion)
{
case GEHEZU_AKTION :
stiftHoch();
schreib(A,B);
break;
case LINIEZU_AKTION :
stiftRunter();
schreib(A,B);
break;
default:
eof=true;
}
}
}
else
{
playErrorTone();
}
CloseFile(plotDatei);
playATone();
}
|
|