|
|
Briefwaage |
|
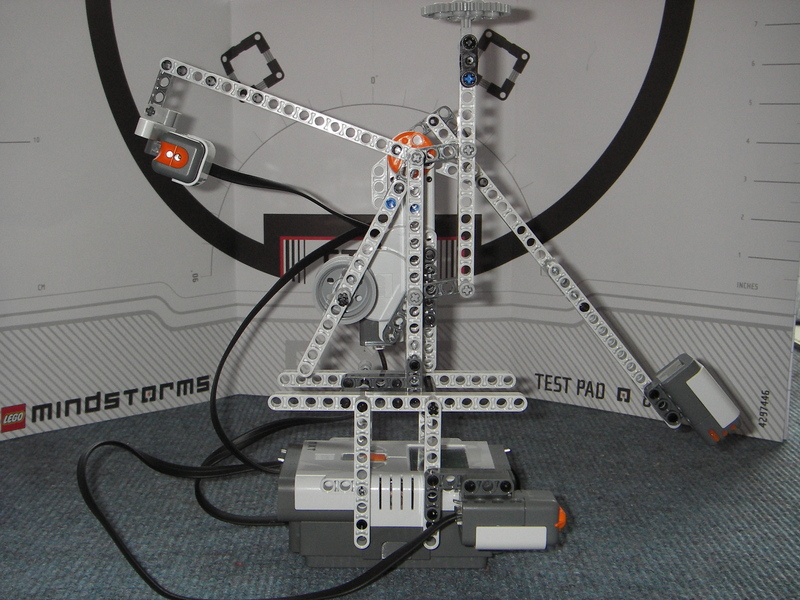
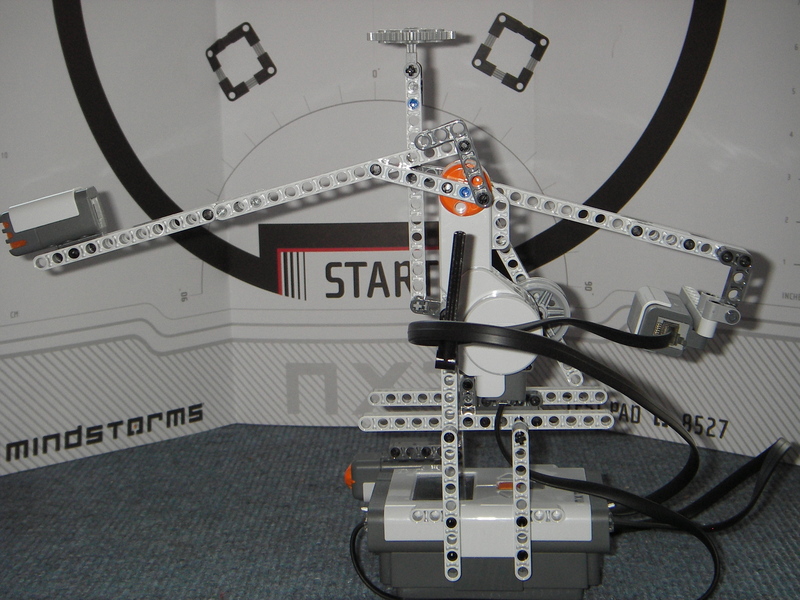
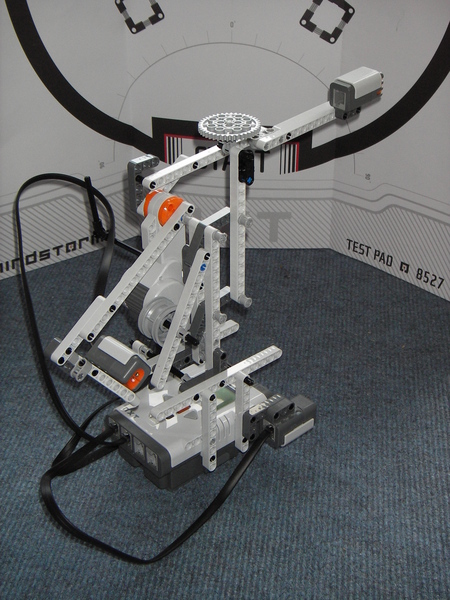
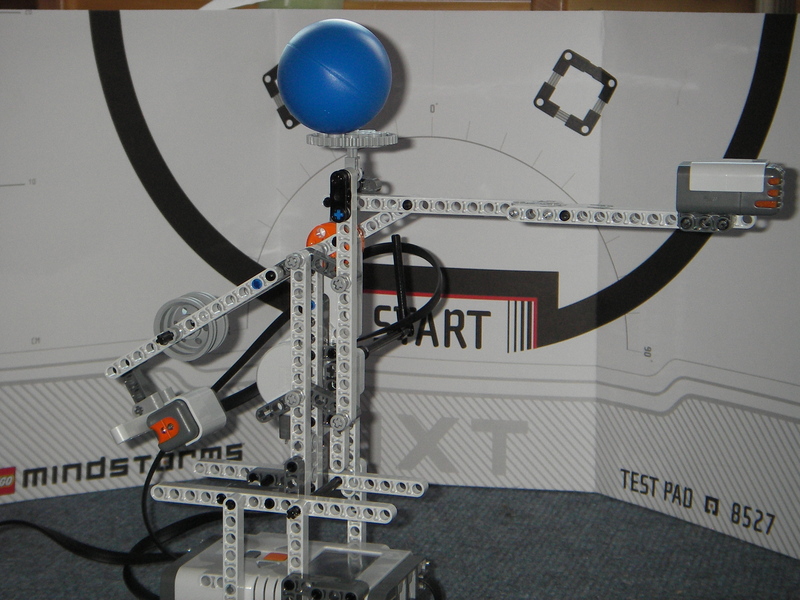
Diese Roboter-Briefwaage funktioniert wie eine klassische mechanische Briefwaage. Das Gewicht des Briefes wird aus dem Winkel des Gewichtsarms ermittelt. Um die Gewichtsmessung nicht durch die Winkelmessung zu stören, wird der Winkel berührungslos mit dem Lichtsensor ermittelt. Ein zweiter Arm, an dem der Lichtsensor befestigt ist, wird auf der gleichen Achse wie der Gewichtsarm gedreht. Mit dem Lichtsensor an seiner Spitze wird erkannt, bei welcher Motorstellung der Messarm den gleichen Winkel hat wie der Gewichtsarm. Zur Vereinfachung der Kalibrierung wird nicht das genaue Gewicht gemessen, sondern nur festgestellt, ob der Brief (oder Ball) leichter oder schwerer als 20 Gramm ist. Unter 20 Gramm spricht die Waage "55 cent" darüber sagt sie "90 cent". Wenn der Drucksensor gedrückt wird, werden die Portowerte für Post innerhalb Europas ausgegeben. Das eingestreute Bild unserer eigentlichen Briefwaage wirft die Frage auf, ob wirklich alle Aufgaben für einen Roboter geeignet sind, wenn es doch robuste mechanische Lösungen gibt. Für die Erstellung der NXT sound Dateien haben wir die wav2rso Anwendung genutzt. 
|
|